
* Informar adecuadamente la actividad desarrollada en este trabajo práctico.
* Implementar un filtro activo.
* Medir sus parámetros.
2. Contenidos:
* Principios de funcionamiento de un filtro pasivo y activo. Modelización. Análisis de models circuitales. Transferencia y respuesta en frecuencia.
3. Materiales necesarios:
* 2 circuitos integrados 741.
* Resistores varios.
* Capacitores varios.
Introducción Teórica:
Filtro Activo:
Un filtro activo es un filtro electrónico analógico distinguido por el uso de uno o más componentes activos (que proporcionan una cierta forma de amplificación de energía), que lo diferencian de los filtros pasivos que solamente usan componentes pasivos. Típicamente este elemento activo puede ser un tubo de vacío, un transistor o un amplificador operacional.
Un filtro activo puede presentar ganancia en toda o parte de la señal de salida respecto a la señal de entrada. En su implementación se combinan elementos activos y pasivos, siendo frecuente el uso de amplificadores operacionales, que permite obtener resonancia y un elevado factor Q sin el empleo de bobinas.
Se pueden implementar, entre otros, filtros paso bajo, paso alto, paso banda.
Filtro pasa-bajo:
 Un filtro paso bajo corresponde a un filtro caracterizado por permitir el paso de las frecuencias más bajas y atenuar las frecuencias más altas. El filtro requiere de dos terminales de entrada y dos de salida, de una caja negra, también denominada cuadripolo o bipuerto, así todas las frecuencias se pueden presentar a la entrada, pero a la salida solo estarán presentes las que permita pasar el filtro. De la teoría se obtiene que los filtros están caracterizados por sus funciones de transferencia, así cualquier configuración de elementos activos o pasivos que consigan cierta función de transferencia serán considerados un filtro de cierto tipo.
Un filtro paso bajo corresponde a un filtro caracterizado por permitir el paso de las frecuencias más bajas y atenuar las frecuencias más altas. El filtro requiere de dos terminales de entrada y dos de salida, de una caja negra, también denominada cuadripolo o bipuerto, así todas las frecuencias se pueden presentar a la entrada, pero a la salida solo estarán presentes las que permita pasar el filtro. De la teoría se obtiene que los filtros están caracterizados por sus funciones de transferencia, así cualquier configuración de elementos activos o pasivos que consigan cierta función de transferencia serán considerados un filtro de cierto tipo. En particular la función de transferencia de un filtro paso bajo de primer orden corresponde a  , donde la constante
, donde la constante  es sólo una ponderación correspondiente a la ganancia del filtro, y la real importancia reside en la forma de la función de transferencia
es sólo una ponderación correspondiente a la ganancia del filtro, y la real importancia reside en la forma de la función de transferencia  , la cual determina el comportamiento del filtro. En la función de transferencia anterior
, la cual determina el comportamiento del filtro. En la función de transferencia anterior  corresponde a la frecuencia de corte propia del filtro, aquel valor de frecuencia para el cual la amplitud de la señal de entrada se atenua 3 dB.
corresponde a la frecuencia de corte propia del filtro, aquel valor de frecuencia para el cual la amplitud de la señal de entrada se atenua 3 dB.
De forma análoga al caso de primer orden, los filtros de paso bajo de mayor orden también se caracterízan por su función de transferencia, por ejemplo la de un filtro paso bajo de segundo orden corresponde a  , donde
, donde  es la frecuencia natural del filtro y
es la frecuencia natural del filtro y  es el factor de amortiguamiento de este.
es el factor de amortiguamiento de este.
Filtro pasa-alto:
 Un filtro paso alto (HPF) es un tipo de filtro electrónico en cuya respuesta en frecuencia se atenúan las componentes de baja frecuencia pero no las de alta frecuencia, éstas incluso pueden amplificarse en los filtros activos. La alta o baja frecuencia es un término relativo que dependerá del diseño y de la aplicación.
Un filtro paso alto (HPF) es un tipo de filtro electrónico en cuya respuesta en frecuencia se atenúan las componentes de baja frecuencia pero no las de alta frecuencia, éstas incluso pueden amplificarse en los filtros activos. La alta o baja frecuencia es un término relativo que dependerá del diseño y de la aplicación.Implementación:
El filtro paso alto más simple es un circuito RC en serie en el cual la salida es la caída de tensión en la resistencia.
Si se estudia este circuito (con componentes ideales) para frecuencias muy bajas, en continua por ejemplo, se tiene que el condensador se comporta como un circuito abierto, por lo que no dejará pasar la corriente a la resistencia, y su diferencia de tensión será cero. Para una frecuencia muy alta, idealmente infinita, el condensador se comportará como un cortocircuito, es decir, como si no estuviera, por lo que la caída de tensión de la resistencia será la misma tensión de entrada, lo que significa que dejaría pasar toda la señal. Por otra parte, el desfase entre la señal de entrada y la de salida si que varía, como puede verse en la imagen.
El producto de resistencia por condensador (R×C) es la constante de tiempo, cuyo recíproco es la frecuencia de corte, es decir, donde el módulo de la respuesta en frecuencia baja 3dB respecto a la zona pasante:

Donde fc es la frecuencia de corte en hercios, R es la resistencia del tweteer o parlante en ohmios y C es la capacidad en faradios.
El desfase depende de la frecuencia f de la señal y sería:
Filtro Pasa-banda:

Un filtro paso banda es un tipo de filtro electrónico que deja pasar un determinado rango de frecuencias de una señal y atenúa el paso del resto.
Implementación:
Un circuito simple de este tipo de filtros es un circuito RLC (resistencia, bobina y condensador) en el que se deja pasar la frecuencia de resonancia, que sería la frecuencia central (fc) y las componentes frecuenciales próximas a ésta, en el diagrama hasta f1 y f2. No obstante, bastaría con una simple red resonante LC.
Otra forma de construir un filtro paso banda puede ser usar un filtro paso bajo en serie con un filtro paso alto entre los que hay un rango de frecuencias que ambos dejan pasar. Para ello, es importante tener en cuenta que la frecuencia de corte del paso bajo sea mayor que la del paso alto, a fin de que la respuesta global sea paso banda (esto es, que haya solapamiento entre ambas respuestas en frecuencia).
Un filtro ideal sería el que tiene unas bandas pasante y de corte totalmente planas y unas zonas de transición entre ambas nulas, pero en la práctica esto nunca se consigue, siendo normalmente más parecido al ideal cuando mayor sea el orden del filtro, para medir cuanto de "bueno" es un filtro se puede emplear el denominado factor Q. En filtros de órdenes altos suele aparecer un rizado en las zonas de transición conocido como efecto Gibbs.
Un filtro paso banda más avanzado sería los de frecuencia móvil, en los que se pueden variar algunos parámetros frecuenciales, un ejemplo es el circuito anterior RLC en el que se sustituye el condensador por un diodo varicap o varactor, que actúa como condensador variable y, por lo tanto, puede variar su frecuencia central.
Realmente resulta realmente complicado construir un filtro paso banda ideal (y, en general, filtros de respuesta ideal) en el mundo analógico, esto es, a base de componentes pasivos como inductancias, condensadores o resistores, y activos como operacionales o simples transistores. Sin embargo, si nos trasladamos al procesado digital de señales, resulta sorprendente ver cómo podemos construir respuestas en frecuencia prácticamente ideales, ya que en procesado digital de señal manejamos realmente vectores con valores numéricos (que son señales discretas en el tiempo), en lugar de señales continuas en el tiempo. Todo ello, no obstante, tiene una limitación importante: cuanto mayor precisión se requiera, mayor frecuencia de muestreo necesitaremos, y ello directamente implica un consumo de RAM y CPU superiores. Por ello, al menos con la tecnología de la que hoy día disponemos, resultaría inviable implementar filtros digitales ideales para radiofrecuencia, aunque en procesado de audio digital sí es posible, dado que el rango de frecuencias que ocupa no supera los 20 kHz.
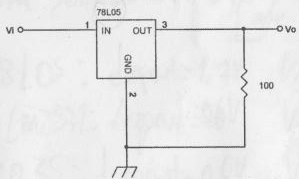
1) Armá el siguiente circuito cuidando de alimentar adecuadamente con +/- 12V sus terminales y filtrando los mismos:
 2) Conéctale a la entrada Vs una señal senoidal de 200mVpp y 100Hz.
2) Conéctale a la entrada Vs una señal senoidal de 200mVpp y 100Hz.Hemos conectado dicha señal al circuito.
3) Medí la tensión de salida, averiguá la ganancia de tensión expresandola en veces y dB. Medí el desfasaje que sufre la señal de entrada. Expresá ese valor en grados sexagecimales
Elaborá una tabla donde reflejen estas mediciones y cálculos de manera ordenada y clara.
 La frecuencia de corte del circuito se calcula realizando la siguiente cuenta:
La frecuencia de corte del circuito se calcula realizando la siguiente cuenta:fc=1/(2pi*R*C)
En este circuito, el valor de fc es de 160Hz.
6) En base a esta tabla realizá dos gráficas:
a) Una gráfica donde se muestre la variación de la ganancia expresada en dB (eje y), en función de la frecuencia (eje x). Para ellos usá un gráfico semilogarítmico. Eje y lineal, eje x expresado en décadas (también llamado decádico) comenzando con una frecuencia de 1Hz.
b) Idem anterior pero en el eje y graficá ahora el ángulo de desfasaje de la señal de salida respecto de la entrada.
El desfasaje calculado es de 227° en la fc.
7) En la primer gráfica marcar la región de paso de banda, la frecuencia de corte, y mediante mediciones logradas a partir de la tabla y/o obtenidas mismo de la gráfica calcular la pendiente de atenuación del filtro expresándolo en dB/dec. En la segunda gráfica marcá cuanto desfasa el filtro a la frecuencia de corte. Asimismo y en ese mismo gráfico marcá cuánto desfasa el filtro una década por encima y por debajo de la frecuencia de corte.
Cada imagen lleva por nombre el valor de su frecuencia.
Filtro pasa-alto:








 Filtro pasa-bajo:
Filtro pasa-bajo:





 La fc práctica es de 185Hz.
La fc práctica es de 185Hz.8) Aumentar dos veces el capacitor usado en el filtro y medir la nueva frecuencia de corte. Explicar cómo influye la frecuencia del capacitor en la frecuencia de corte del filtro.
La nueva fc calculada mediante la fórmula es 80Hz.
La fc práctica se determinó en 95Hz.
9) A manera de prueba, reemplazará el generador de señales por la salida de un reproductor de MP3. Compará la señal que te entrega este circuito. Describí esta experiencia.
Este punto no fue realizado por nuestro grupo, ya que no era necesario.
10) Repetí los pasos 1 a 8 con el siguiente circuito:
 En este caso, la fc calculada es de 1,6KHz.
En este caso, la fc calculada es de 1,6KHz.Por otro lado, la fc práctica la encontramos en 1,48KHz.
Ganancia de tensión en veces: 7,25
Ganancia de tensión en dB: 17,2dB
Desfasaje: 180°
Desfasaje calculado a fc: 220°
11) Diseño:
Se tienen dos señales senoidales de 1Vpp.Una de ellas es de 50Hz, la otra es de 60Hz. Se requiere diseñar un sistema que me entregue 5V (un uno lógico) cuando la señal de entrada sea de 60Hz, y 0V cuando ésta cambie a los 50Hz.
Se pide: Dibujar el circuito final con todas las mediciones y cálculos realizados para su solución.
 Hicimos las cuentas para que el filtro pasa-altos bloquee las frecuencias menores a 55Hz, y el filtro pasa-bajos las de 65Hz posteriormente. En total, entre los dos circuitos amplificadores, la ganancia es de 5 veces.
Hicimos las cuentas para que el filtro pasa-altos bloquee las frecuencias menores a 55Hz, y el filtro pasa-bajos las de 65Hz posteriormente. En total, entre los dos circuitos amplificadores, la ganancia es de 5 veces.El circuito en el protoboard nos quedó así:
 El circuito no respondió de la manera esperada. Desconocemos la razón de esto.
El circuito no respondió de la manera esperada. Desconocemos la razón de esto.

.png)

.png)
.png)



 En este circuito, estamos alimentando el amplificador operacional (A.O.) con dos tensiones +Vcc = 15V y -Vcc = -15 V. Conectamos la patilla V+ del A.O. a masa (tierra) para que sirva como tensión de referencia, en este caso 0 V. A la entrada V- del A.O. hemos conectado una fuente de tensión (Vi) variable en el tiempo, en este caso es una tensión sinusoidal.
En este circuito, estamos alimentando el amplificador operacional (A.O.) con dos tensiones +Vcc = 15V y -Vcc = -15 V. Conectamos la patilla V+ del A.O. a masa (tierra) para que sirva como tensión de referencia, en este caso 0 V. A la entrada V- del A.O. hemos conectado una fuente de tensión (Vi) variable en el tiempo, en este caso es una tensión sinusoidal.




